Truth is ever to be found in simplicity, and not in the multiplicity and confusion of things.Isaac Newton
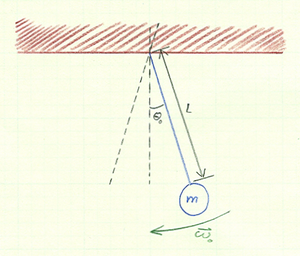
A common example of a mechanical system that exhibits harmonic motion is the simple pendulum. A simple pendulum is an idealized system consisting of a bob of mass $m$ attached to a piece of string of length $L$. The equation of motion of this system is
$\displaystyle{ \dot{\theta}^2 =\frac{2 g}{L} \cos \theta + C \text{,} }$
where $C$ is a constant that is determined by the initial conditions of the pendulum. Two things to note about the differential equation above: 1) It is independent of mass $m$, and 2) it contains a useful parameter $g/L$ that the program will make use of as g_over_L. It is perhaps not surprising that the equation of motion is independent of mass since a simple laboratory experiment will reveal that altering the mass of the bob will have no effect on the period $T$ of the pendulum (more on period in the Notes). Moreover, we can encode this fact into the algorithm by using Newton's second law in "reduced units" with a(i) = f_osc. This also has the advantage of reducing the number of operations the simulation needs to perform.
The default parameters of this program generate a stable numerical solution when simulating large amplitude oscillations. Note that energy is given in reduced units of s-2.
References
Boas, Mary. Mathematical Methods in the Physical Sciences. Wiley: John Wiley & Sons, 1983. 478.
Oscillations of a Pendulum
This program solves the equation for the total energy of a simple pendulum to illustrate conservation of mechanical energy for large oscillations.
$\displaystyle{ \frac{1}{2} m L^2 \left( \frac{\mathrm{d} \theta}{\mathrm{d} t} \right)^2 = m g L (\cos \theta - \cos \theta_0) }$